研究内容
研究業績
ニュース
メンバー
お問い合わせ
研究内容
屋内点検用ドローンの開発
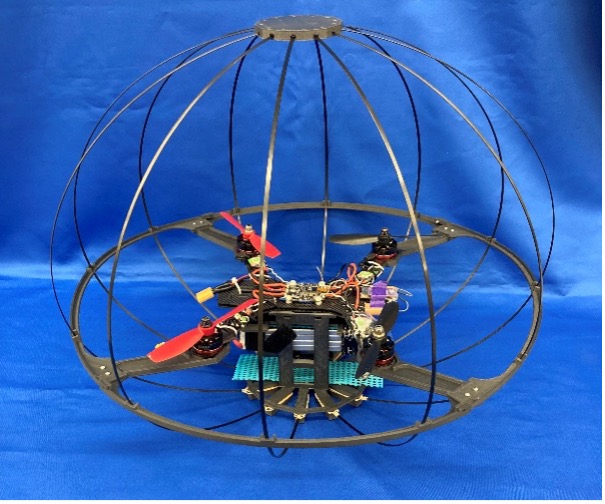
狭い空間で飛行可能なガード付きドローンの開発
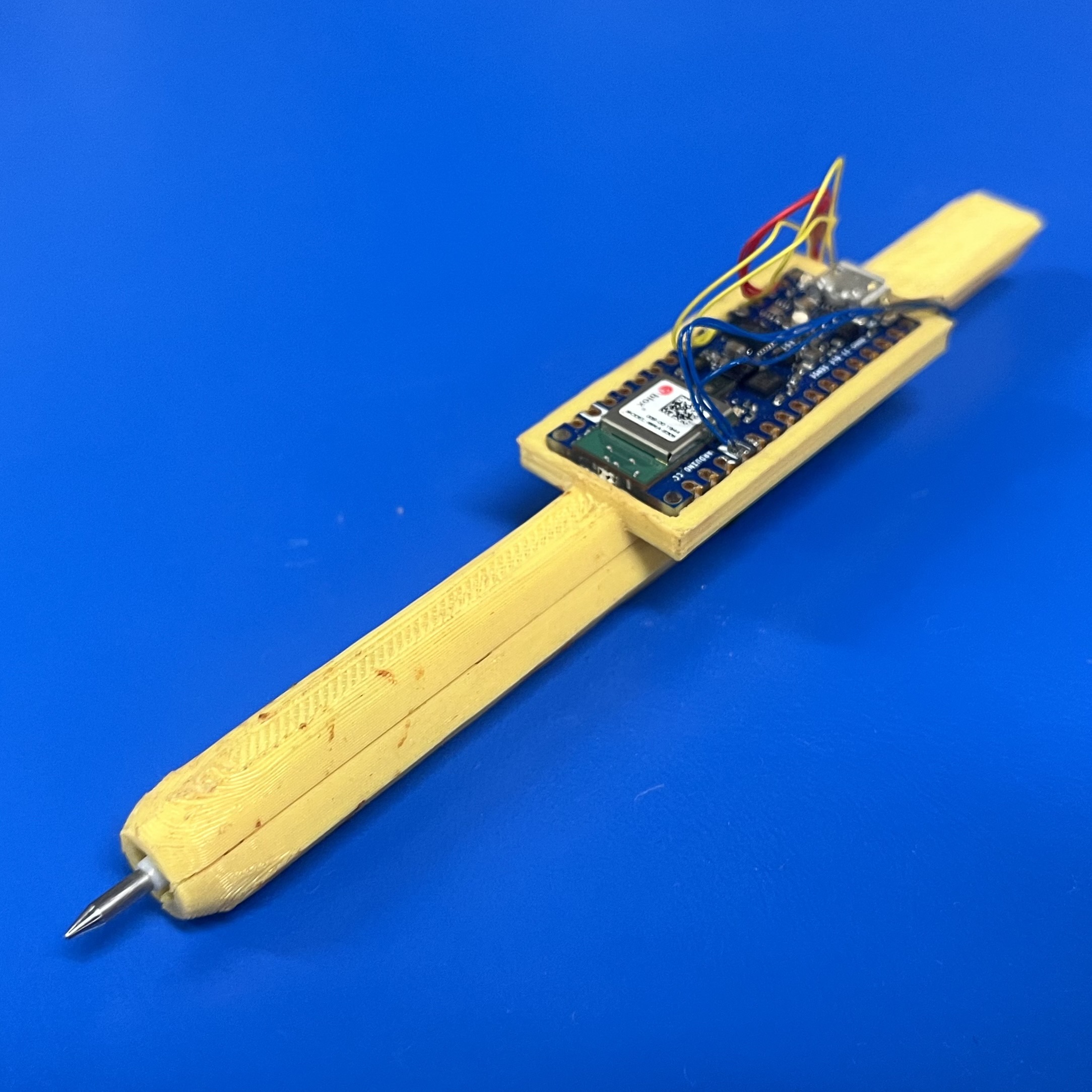
ウェアラブルセンサを用いた人間の動作認識
筆記動作データを用いた深層学習による文字認識
人工知能による有害鳥獣の自動捕獲装置の開発
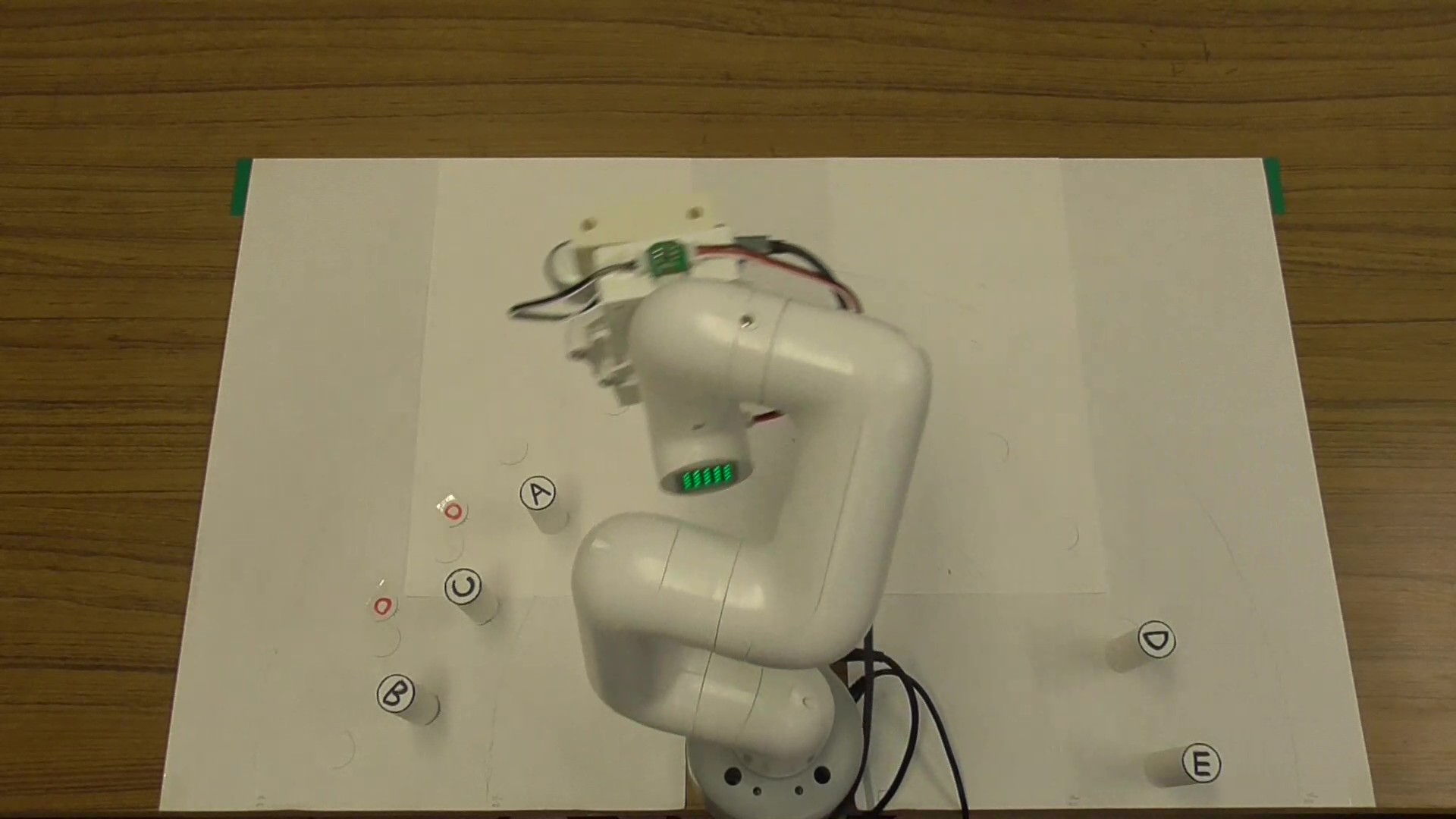
最適な動作手順で品物を並び替えるAIを搭載したロボット・アーム
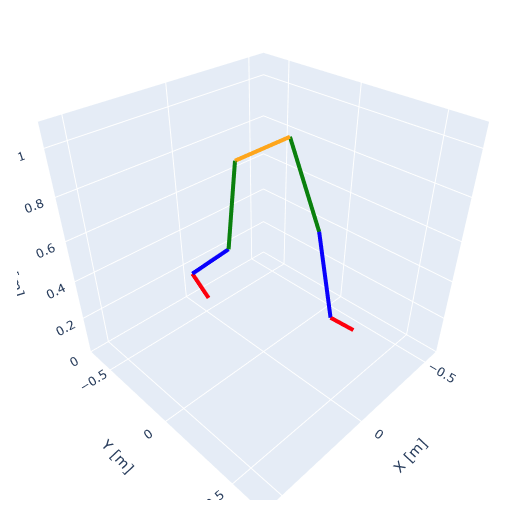
深層強化学習を用いた二足ロボットの歩行動作生成及び制御アルゴリズムの開発
屋内長時間点検のための磁気吸着ドローンシステム